Úvod
Každý nový nápad, myšlenka, inovace nebo technologie mají svůj životní cyklus a vývoj. S novým nápadem přichází velké očekávání, nehledíme kolem sebe, tedy ani na překážky a jdeme si za svým cílem. Překážky ale nelze opomíjet, a tak po prudkém vzestupu následuje často vystřízlivění nebo zklamání, kdy ony překážky převáží počáteční nadšení. S technickým pokrokem ale získáváme nové poznatky, řadu příčin a souvislostí objasníme a znovu přichází vzestup, již ne tak prudký a překotný, ale pozvolný a nové metody si nacházejí svá uplatnění. Jistě by se dalo vyjmenovat z oblasti zemědělství mnoho takových případů. Asi nejlépe dokumentuje úvodní slova cesta precizního zemědělství. Počáteční nástup byl velmi ambiciózní, ale řada překážek významnému uplatnění často bránila. S významným zpřesněním satelitní navigace, výkonnou telekomunikační sít a mobilních telefonů, dostupností internetu, rozvojem senzorové techniky dostává řada původních myšlenek zcela nový impuls a možnost uplatnění.
Jednoznačným trendem současného vývoje v oblasti výrobních a spotřebitelských trendů a komunikačních technologií je transformace reálného světa fyzických objektů do objektů virtuálních a sloučit jednotlivé dění pod společnou infrastrukturu. Digitalizace výrobních procesů přináší propojování jednotlivých informačních hladin z více zdrojů do společných databází, souvislostí a funkcionalit. Digitalizace proniká do všech odvětví, včetně zemědělství.
Tento směr nám umožní kontrolu věcí kolem nás, ale také udržet nás informovanými o stavu věcí. Změna povahy průmyslu, zemědělství, energetiky, obchodu, logistiky a dalších částí hospodářství se opírá o obory již využívané, ale rovněž o zcela nové pojmy: internet věcí (IoT), umělá inteligence, Big data, autonomní roboti, senzory, cloudové výpočty, 3D tisk, nanotechnologie, genetika, datová uložiště, aditivní výroba, umělá inteligence, M2M (machine to machinecomunication). Podpora IoT a nástup robotů v mnoha činnostech každodenního života činí z robotických aplikací podporovaných IoT hmatatelnou realitu naší nadcházející budoucnosti (Grieco a kol., 2014).
Nástup autonomních systémů, požadavky na sběr a zpracování velkého objemu dat, kontrola vstupů, vše podpořeno prudkým nástupem výpočetní techniky, senzorů, mobilních telefonů zapadá koncepčně do vývojového směru, který se obecně označuje jako Průmysl 4.0. S tímto termínem se tak pojí řada dalších oborů, Doprava 4.0, Ekologie 4.0, Stavebnictví 4.0… Ne vždy může číslovka vyjadřovat přesný časový vývoj, nicméně se stala jakýmsi synonymem pro zcela nové pojetí výroby a řízení vstupů. Zemědělství rozhodně nezůstává pozadu. Podpora rozhodování, která vzejde z vývojové a výzkumné činnosti je jistým předpokladem pro efektivní a šetrné hospodaření v krajině. Detailní monitoring, tvorba modelů a včasná signalizace umožní v rozhodovacích procesech optimalizovat vstupy podle zásady dělat správné věci ve správný čas na správném místě. Na základě získaných poznatků informační technologie rovněž umožní propojení s širokým okruhem dalších oborů. Aby bylo možné tyty myšlenky postupně naplňovat bude zapotřebí výrazně pracovat na sběru dat, jejich ošetření, filtraci a interpretaci. Obecně lze říci, že zavádění uvedených pojmů do reálných aplikací a oborů je souhrnně označováno slovem SMART. Pojem SmartFarming lze považovat za nástupní směr pro technologie precizního zemědělství. Jak uvádí Wolfert (2017) Smart Farming vychází ze zavádění informačních a komunikačních technologií a lze očekávat, že internet věcí a cloudové výpočty podpoří tento vývoj a zajistí uplatnění pro robotiku a umělou inteligenci v zemědělství.
Myšlenka polní robotiky
Smart Farming integruje agronomii, řízení lidských zdrojů, nasazení personálu, nákupy, řízení rizik, skladování, logistiku, údržbu, marketing a odhady výnosu a další do jediného systému. S ohledem na nárůst populace lidí a zajištění jejich obživy bude nezbytné přijmout nové technologie, které povedou k automatizaci sběru dat, efektivnímu využití zdrojů a řízení výrobních procesů. Zemědělství v rozvinutých zemích, zejména po průmyslové revoluci, směřovalo především k navyšování energetických vstupů využíváním velkých a výkonných traktorů a navyšováním potřeby chemických přípravků a hnojiv. Ačkoliv tento trend vyvolává negativní sociální a environmentální dopady, jeho uplatnění vyžaduje rostoucí populace lidí. Tyto země si na druhou stranu vyvíjejí technologie pro udržitelné zemědělství s cílem zmírnit tyto negativní dopady. Úbytek pracovní síly v zemědělství se sice zmenšuje a každý pracovník zodpovídá za obhospodaření větší plochu půdy, pokračování trendu směrem k větším a těžším zařízením nepředstavuje řešení. Průměrný věk pracovníků v zemědělství se zvyšuje. Navíc z tohoto vyplývá, že znalosti a zkušenosti nejsou předávány mladším generacím. Budou vyžadovány nejen nové technologie, ale rovněž nový způsob myšlení. Inteligentní stroje a roboti tak mají vysoký potenciál. Dohromady se senzorovou technikou včetně GPS navigacemi a strojním viděním představují řešení pro management polních prací od chemických aplikací, zpracování půdy, stanovení stavu porostů, zralostí porostů po sklizeň. Naproti tomu zhutnění půdy způsobené těžkými traktory a dalšími velkými stroji, znečištění životního prostředí způsobené nadměrným používáním chemikálií a hnojiva a obavy o bezpečnost potravin jsou negativní výsledky našeho úsilí o dosažení vyšší produktivity. Robotické systémy, jako náhrada za pracovníky, budou nepostradatelné pro zajištění výroby potravin (Noguchi, 2018).
Podle odhadů bude na Zemi do roku 2050 žít 9,7 miliard lidí. Za více než desetiletí vzroste populace na Zemi na 8,5 miliard. Jedná se o 10% nárůst oproti současnému stavu 7,7 miliard. Odhaduje se, že v roce 2100 to bude již nárůst 42% (10,9 mld.) (United Nations 2019).
V zemědělském sektoru převládá nejistota, kdy se celé prostředí od pěstitelů, chovatelů pro zpracovatelské podniky musí potýkat s novými překážkami. Nestálé ceny, změny klimatu, ochrana půdy, bezpečnost potravin jsou jen některé z nich. V příštích 40 letech naroste celosvětově poptávka po hlavních plodinách o 60 %. Některé zdroje uvádí až o 100 %. V rámci těchto výzev si společnost uvědomuje rostoucí roli, kterou v nadcházejících letech budou hrát digitální technologie a jak se jim přizpůsobit (Shankar a kol., 2016). Dosažení tohoto cíle pouze s využitím tradičních metod zemědělství a chovu hospodářských zvířat se ukazuje jako obtížné. Jedním z důvodů jsou také omezené možnosti rozšiřování pěstebních ploch z hlediska životního prostředí (Schönfeld a kol., 2018). Společně se zaváděním nových technologií a nástupem autonomních systémů vyvstávají nové otázky a rizika. Na jedné straně je snaha o zajištění produkce v souladu s ochranou přírody, na straně druhé otázky ekonomické, sociální, migrační, právní nebo bezpečnostní.
Nástup samosprávných systémových struktur nám dává příležitost rozvinout zcela novou řadu zemědělských zařízení, založenou na autonomních strojích, které umí dělat ty správné věci na správném místě ve správný čas a správným způsobem. V rámci fóra Inclusive Growth zazněly názory na perspektivu moderních technologií od předních konzultačních firem (Brini, 2017).
McKinsey&Company uvádí: “Vývoj pokročilých technologií je formován dvěma technologickými trendy: velkými daty a pokročilými analytickými schopnostmi na jedné straně a robotikou - leteckými snímky, senzory, sofistikovanými predikcemi počasí na straně druhé. Podle odhadů z roku 2014 se očekává, že globální trh pro zemědělskou robotiku do roku 2020 poroste ze současných 1 miliardy USD na 14 - 18 miliard USD.“
“Tradiční rozhodování založené na zkušenostech farmáře budou nahrazeny algoritmy vycházejícími z naměřených dat. Místo fyzické obchůzky a kontroly pozemků bude několik zaměstnanců rozhodovat na základě pravidelného monitoring z autonomních bezpilotních prostředků a dalších strojů, které pracují na úrovni jednotlivých rostlin z kancelářského pracoviště. To vše s předpokladem významné úspory vstupů. Významný nárůst a především přijetí smart technologií, které integrují BIG data, analytické nástroje, bezdrátovou komunikaci, vyspělou techniku včetně molekulární biologie se předpokládá už do roku 2030” (The Boston Consulting Group).
“Technologie, jako jsou moderní senzory a monitorovací zařízení, mohou nyní zemědělcům umožnit sledovat plodiny přesněji a mnohdy nepřetržitě. Pro účinné zapojení těchto technik bude nezbytné, aby přední místa zaujaly technologie IoT. Internet věcí by měl umožnit převýšení pouhého zlepšení stávajících zemědělských procesů; musí zavádět inovace, které překonají tradiční kompromisy. Odhaduje se, že s novými technickými možnostmi má internet věcí potenciál zvýšit zemědělskou produktivitu do roku 2050 o 70 %“.
“Čtyři komponenty: výroba, sledování, syntéza a podpora rozhodování. To jsou základní požadavky farmy budoucnosti. Produktivita farmy je omezena nejslabší složkou rámce. Bez sledování informací se jen obtížně hledá prostor pro zlepšení, pokud nemůžete ukládat své informace, nemůžete je použít k lepšímu rozhodování a moderní vybavení potřebuje podporu v rozhodování při převodu informací k aplikaci“. (Deloitte Consulting).
„Příslib přesného zemědělství, v nižší spotřebě a navýšení produkce oslovilo řadu zájemců. Technologie sběru dat se rychle vyvíjejí. Na druhou stranu, převládá obava týkající se schopnosti používat data k nalezení nejlepšího řešení, vzhledem k složitému prostředí, jakož i dlouhodobému výrobnímu cyklu v zemědělství. Přes značný pokrok spočívá zásadní otázka ve výběru dat, implementaci a účinném využívání. Rovněž zákony a předpisy o vlastnictví dat jsou zdrojem obav, ale nejsou překážkou pro pokračující vývoj v této oblasti. Cesta k akceptaci spočívá v přidané hodnotě sdílených dat. (Pricewaterhouse Coopers).
Australská společnost KPMG definuje internet věcí následovně: „Internet věcí slouží předřevším k tomu, aby objekty mohly být snímány a ovládány vzdáleně přes existující infrastrukturu, vytvářely příležitosti pro přímější integraci mezi fyzickým světem a počítačovými systémy. Tato technologie řídí koncept precizního zemědělství za účelem zlepšení rozhodování pěstitelů pomocí analýzy dat. Zahrnuje software, jako jsou velká datová řešení a nástroje pro správu farem a hardware, jako jsou senzory, bezpilotní prostředky a satelity.“
Společnost Accenture poukazuje na skutečnost, že nové digitální technologie nyní umožňují sbírat a využívat obrovské množství zásadních dat i při minimálních nákladech.
Také IBM se již připravuje na situaci, kdy bude k dispozici velké množství dat, které budou automaticky transformovány do informací prostřednictvím umělé inteligence.
Fyzická omezení strojních zařízení
Při pohledu na strojní zařízení, která pracují především v rostlinné produkci, sledujeme trend výkonných a velkých traktorů s výkonem okolo 450 kW. Je to rovněž dáno kombinací záběru strojů, pracovní rychlosti tahové síly a účinnosti. Adekvátně výkonu musí být traktor dostatečně těžký. Dotížení traktoru se pohybuje v rozmezí od 60 do 70 kg/kW, resp. od 21 000 do 31 000 kg celkové hmotnosti. Například 36 řádkový secí stroj pro přímé setí, pracující rychlostí 10 km/h vyžaduje cca 6.25 kW/řádek. K tomu je zapotřebí dodržovat doporučené huštění a rozměry pneumatik dané výrobcem. Zde také platí vztah mezi huštěním pneumatik a půdou. V souvislosti s tím je doporučováno snižování tlaku v pneumatikách na minimum s ohledem na maximální výkonnost a spotřebu paliva. Při dalším navyšování výkonu traktoru nad současný trend budou muset být navyšovány další limity. Jedná se například o navyšování zátěže pneumatik, velikostí pneumatik, počtu pneumatik na nápravu nebo počtu náprav. Zde však narážíme na omezení jako maximální šíře traktoru a zařízení v rámci evropských zemí 3 a 3,5 m. Další limit představuje maximální možné zatížení na nápravu 15 000 kg (Shearer a Pitla 2013).
Vývoj na poli automatizace polních strojů
Od počátku vývoje robotických systémů byla představena řada kroků směřující k nástupu robotů a autonomních strojů, jako je snímání, navigace, ovládání, komunikace a spolupráce robotů s lidmi. Zavádění prvků automatizace lze pozorovat na několika dílčích krocích. S představením a využitím mikroprocesorů v zemědělských strojích bylo jen otázkou krátkého času, kdy bude spuštěna realizace sdílení a správy dat mezi jednotlivými procesory. Důležitými prvky pro zavádění automatizace spočívá také v budování RTK korekčních stanic a sítí pro bezdrátovou komunikaci a transfer dat. Vznikne tak dostatečná kapacita pro generování, sdílení a ukládání dat v reálném čase pro kontrolu funkcí strojů, podporu vzájemné komunikace mezi stroji (M2M) a sdílení dat pro vzájemnou koordinaci polních prací. Vše směřuje k postupnému zavádění automatizace zemědělských strojů (Shearer a Pitla 2013).
Významným krokem v modernizaci a komunikaci mobilních prostředků v zemědělství bylo zavedení systému sběrnice ISO (ISO 11783), která využívá CAN technologii pro elektronickou komunikaci. S nárůstem množství dat získaných z mobilních i statických zdrojů roste potřeba standardizace datové základny. Výrobci zemědělských a lesnických strojů zaručují zaměnitelnost senzorů a ovladačů a akceptují modulový design nových výrobků. Formáty datových souborů jsou standardizovány v ISO 11 787. Díky těmto normám mohou být informace snadno a efektivně vyměnitelné. Otevírá se značný potenciál pro technologie precizního zemědělství a SmartFarming. Stručný přehled využití standardizované komunikace spočívá v: ovládání a kontrole připojených strojů z kabiny, využití navigace, řízení flotil strojů, využití pouze jednoho terminálu pro různé stroje, výměně dat mezi strojem a traktorem, ovládání pomocí joysticku, aplikaci systému TIM – Tractor Implement Management, kdy stroj přebírá řízení traktoru, sběru a ukládání informací o variabilním a autonomním řízení sekcí připojeného nářadí. Zatímco norma ISO 11783 řeší komunikaci mezi stroji, stále je zapotřebí rozvíjet standardizaci v oblasti předávání dat mezi kanceláří a strojem. Příkladem mohou být tzv. předpisové mapy pro variabilní aplikace.
Zásadní krok v automatizaci procesů představuje výrazné rozšíření polních navigací. Především družicové navigační systémy představují použitelný systém pro zemědělství. Výrazné uplatnění poskytuje kombinace GPS navigace a korekce RTK (Rovira-Más a kol., 2010). Logickým krokem v dalším rozšíření a uplatnění navigací je autonomní otáčení strojů na souvratích a s tím spojené ovládání nářadí (Obrázek 1). Následují variabilní aplikace, založené na snímání rostlin, půdy nebo dalších vlastností porostů v reálném čase a následné okamžité reakci na daný stav, nebo využití předem připravených aplikačních map. Významnou kapitolu představuje automatické ovládání sekcí aplikační techniky (Shearer a Pitla 2013).

Obrázek 1: Ukázka použití navigace a autonomního otáčení souprav na souvratích (foto: Strom Praha).
Posun k vyššímu stupni autonomie
Tato myšlenka není zcela novou. Mnoho inženýrů již v minulosti vyvinulo traktory fungující bez řidiče, ale žádný z nich nebyl úspěšný, neboť nebyl schopen zahrnout rozmanitost skutečného prostředí. Mnozí z nich převzali průmyslový způsob hospodaření, kde je všechno předem známé a stroje pracují výhradně podle předem definovaných postupů – stejně jako výrobní linka. Současné pojetí si klade za cíl vyvinout chytřejší stroje, které budou natolik inteligentní, aby byli schopny pracovat v polním prostředí a vykonávat různé druhy zemědělských činností. Tyto stroje nemusí být inteligentní ve smyslu, jak se díváme na inteligenci u člověka, ale musí projevovat určitou dávku rozumného chování v rozpoznatelných souvislostech. Z tohoto hlediska by měli mít dostatek vnitřně zabudované inteligence, aby byly schopny samostatného chování po delší časové období, bez dozoru, v provozním prostředí při provádění potřebných úkolů. Jednou z cest pochopení spletitosti všech postupů bylo určení činností, které lidé dělají v určitých situacích a jejich rozložení do jednotlivých příkazů pro strojové řízení. Nazývejme to například robotické chování a návrh metod pro aplikování přístupů v zemědělství. Tento přístup k zacházení s plodinami a půdou selektivně, podle jejich potřeb pomocí malých samostatných strojů je přirozeným krokem k rozvoji precizního zemědělství, třebaže zmenšuje pole působnosti až k individuálnímu přístupu k pěstovaným rostlinám. Autonomní roboti pro zemědělskou praxi se v budoucnu mohou stát realitou. Dnes se většina zemědělských plodin pěstuje v řádcích. To by mohl být rovněž podnět pro vývoj těchto systémů a do jisté míry usnadnění práce pro robota z pohledu snadné orientace v porostu následováním řádků rostlin (Astrand a Baerveldt 2005).
S nástupem elektroniky a senzorů se rovněž snižuje měřítko pro rozhodování a variabilní zásahy. Z jednotky farma se tak dostáváme na měřítko pole a časem se jistě dopracujeme na měřítko rostlina nebo části rostlin. V souvislosti s tzv. robotickým zemědělstvím se stále častěji k běžným termínům ze zemědělské praxe přiřazuje předpona mikro - hovoří se mikrozpracování půdy, mikropostřiku a podobně. Na obrázku 2 je představen poloautonomí kultivátor pro meziřádkovou kultivaci a kypření v řádku mezi rostlinami.

Obrázek 2: Poloautonomní kultivar pro mechanickou likvidaci plevelů. (Foto Kroulík)
S menším měřítkem bude také zapotřebí menších strojů. Mobilní roboti by mohli převzít běžné úkoly, jako je kontrola zaplevelení nebo napadení rostlin chorobami, variabilní aplikace, mapování pozemků nebo například umísťování atraktantů pro přilákání přirozených nepřátel škůdců (Van Henten a kol., 2009). K výkonu této funkce musí veškerá použitelná data splňovat základní požadavky - pohotovost a prostorovou rozlišovací schopnost. Od zjištění požadavku do provedení zásahu běží velmi krátká reakční doba. Zatímco u herbicidů máme možnou optimální operativní dobu 4 až 6 dnů, u škůdců a chorob mohou být rozhodující jen 2 dny. Podobně má na užitečnost dat vliv opakování jejich sběru. Optimálním stavem pro řízení agronomických aktivit by byl kontinuální každodenní průzkum, neboť po delší periodě než 2 až 3 dny, jejich aplikační užitečnost pro posuzování zdravotního stavu a škůdců klesá o více než 50 %. Stav zaplevelení je nutno znát krátce před provedením aplikace nebo přímo v době aplikace (Soukup 2000).
Výzkum a vývoj v této oblasti je zaměřen na představení vysoce sofistikovných robotů, zcela nezávislých na lidském rozhodování, kteří díky vysoké technologické úrovni mohou přinést ekonomický a ekologický prospěch (Ruckelshausen a kol., 2009). Jak uvádí Blackmore (2009) je možné rozdělit pěstební sezonu s ohledem na využití robotů do tří fází: zakládání porostu, cílené ošetřování a selektivní sklizeň.
Při zakládání porostu by byly maximálně respektovány půdní podmínky a požadavky osiva s cílem snížení počtu operací na minimum. Intenzivní zpracování půdy vyžaduje dostatečně výkonné traktory. Pokud ale uvažujeme o menších a lehčích strojích, potom jsme například ve velikosti tažné síly značně limitování. Alternativou může být právě cílené zpracování půdy pro jednotlivé rostliny. Společně s lokální aplikací hnojiva by bylo možné vytvořit požadované podmínky pro růst a vývoj rostlin. Rovněž rozmístění osiva nebo sadby do pravidelného organizovaného sponu, kde navíc bude známá poloha jednotlivých rostlin, umožní další cílené zásahy jako je přihnojování, ochrana rostlin nebo případné dosévání a dosazování.
Ve fázi ošetřování porostu bude kladen důraz na důkladné monitorování stavu rostlin a na základě potřeby nebo zjištění infekčního tlaku bude proveden cílený zásah. Cílená aplikace může být navíc provedena velmi rychle. Další možností je podání informace o případné hrozbě zasláním zprávy konkrétní osobě. Významnou roli v této oblasti může hrát také mechanický způsob potlačování plevelů, vzhledem k neorganizovanému výskytu plevelných rostlin a známé poloze rostlin kulturních.
Při selektivní sklizni může být nahrazena lidská práce při kontrole zralosti, barvy, velikosti plodů apod. Při jednorázové sklizni není respektována variabilita porostu, ač je tato skutečnost obecně známa. Jak uvádějí Stentz a kol., (2002), automatizací zemědělských strojů můžeme zvýšit produktivitu, zlepšit bezpečnost a snížit náklady mnoha zemědělských operací.
Koncepty robotů pro zemědělství
Koncept člověk - robot
Kooperace lidí (HO; Human Operator) a robotů jako HRI nebo HRS (Humane-Robot Interaction; Human Robot System) v posledních letech výrazně nabylo na významu. Kooperaci robotů a člověka můžeme definovat ve čtyřech bodech od dozorování rutinních úkonů, kdy roboti provádí omezenou sérii akcí, po dálkově ovládané stroje pro řešení nepředvídatelných situací nebo plnění úkolu v režimu mastere - slave, autonomní vozidla, kdy je člověk na pozici cestujícího, po interakci sociální (Sheridan, 2016). Lze předpokládat, že lidé budou i nadále zapojeni do rozhodovacího procesu a roboti budou v procesu napomáhat a s rostoucí inteligencí strojů bude systém více a více autonomní (Wolfert 2017).
Pokud uvažujeme o zemědělství, stojí na jedné straně vysoký stupeň variability, anomálií a nepředvídatelných situací, pro zemědělství typické, kdy jsou schopnosti lidí vnímat, přemýšlet a rozhodovat se nepřekonatelnými (Tervo a Koivo, 2014), na druhé straně čelíme nedostatku pracovní síly. Ačkoliv je pro řadu zemědělských operací možné počítat s uplatněním autonomních prostředků (Marinoudi a kol., 2019), některé speciální práce nelze spolehlivě robotickými systémy plně nahradit. Zejména se jedná o pěstování ovoce a zeleniny. V případech, kdy manuální práci nelze nahradit robotem, lze manuální práci robotických systémem doplnit a těžit tak ze vzájemné spolupráce (Bechar a Vigneault, 2016; Vasconez a kol., 2019).
Pro vyřešení problému s nedostatkem pracovní síly v zemědělství se řeší možná kooperace robotických traktorů s traktory ovládanými řidičem (Obrázek 3). V tomto režimu systému robot pracuje na pozemku a je sledován řidičem, který provádí jinou operaci. Kromě RTK navigace se využívají další podpůrné systémy jako je například IMU jednotka (Inertial Measurement Unit, zahrnuje kompas, akcelerometr a gyroskop). Výsledky ukazují na výrazné zvýšení přesnosti navigace a rovněž výrazné zkrácení doby potřebné na polní operace v porovnání s prací jednoho traktoru (Zhang a kol., 2015).

Obrázek 3: Odvozový prostředek pracuje v kooperaci se sklízecí mlátičkou (foto Kroulík).
Autonomní polní robot
Autonomní robotické systémy (ARS; Autonomous robot systems) jsou vyvíjeny pro provádění úkolů, rozhodování a jednání v reálném čase bez zásahu člověka. Řada výzkumů se také orientuje na vývoj robotů do nestrukturovaného prostředí a to jak venkovního tak vnitřního. Od podobných strojů se vyžaduje vysoká míra flexibility, proto sběr dat a rozhodování jsou základními požadavky na dosažení přiměřeného stupně autonomie (Bechar a Vigneault, 2016).
Robotický zemědělský systém plně automatizuje zemědělské činnosti,
od zakládání porostů a sklizně až po dodávky konečnému uživateli. Robotické traktory a robotické stroje využívají přesné navigace. Veškeré stroje plní zadané úkoly s možností vzájemné komunikace mezi stroji. Obrázek 4 prezentuje vizi robotické farmy. Zahrnuje systém řízení robotů v reálném čase, monitoring strojů, navigační systémy a samozřejmě bezpečnostní prvky. Operátor v řídicím centru může analyzovat data odesílaná robotickými stroji v reálném čase a může okamžitě předávat informace zemědělcům, maloobchodníkům, případně výrobcům atd. Operátor rovněž vidí stav zařízení v reálném čase s využitím GIS aplikací, zatímco stroj pracuje (Noguchi, 2018).
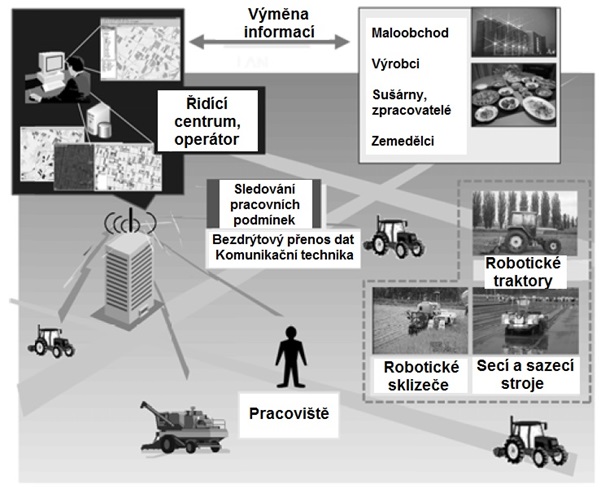
Obrázek 4. Ukázka organizace robotické farmy (Noguchi, 2018). Upravil Kroulík
Příklady provedení, výzkumné projekty
Společnost CNH představila koncepci autonomních traktorů (Obrázek 5), který konstrukčně vychází ze současných traktorů. Je určen pro autonomní práce, případně pro kooperaci s jiným traktorem ovládaným řidičem. S telematickým přenosem dat je možné vzdáleně kontrolovat práci strojů a rozhodovat v případě omezení nebo překážek.

Obrázek 5: Koncepce robotického traktoru společnost CNH
John Deere představil nový traktor během dealerské akce ve Španělsku. Traktor je autonomní, má elektrický pohon, je vybaven pásy a kloubovým řízením, kdy je kloubem spojená jednotka pohonná a pracovní (Karsten 2019) (Obrázek 6).

Obrázek 6: koncepce robotického traktoru John Deere
S provozem velkých traktoru je na druhou stranu spojeno utužení půdy a poškozování půdní struktury. Pokud jsou traktory menší a lehčí nedochází k tak výraznému poškozování půdy, ale také klesá výkonnost traktorů. Pro zajištění shodné plošné výkonnosti je zapotřebí jejich většího počtu. Z pohledu ekonomiky však toto řešení není přijatelné, už jenom z pohledu zajištění řidičů pro jednotlivé traktory. Řešení se nabízí v nasazení autonomních systémů, které nahradí těžké traktory v podobě malých a lehkých robotů. Farmy tak budou mít k dispozici skupiny robotických traktorů. Stále však stojíme před řadou problémů (Grimstad a From 2017). Většina výzkumů v oblasti nasazení skupin (rojů) robotů vychází z běžného chování sociálních skupin hmyzu, ryb nebo savců (Tan a Zheng 2013). I když se ukazuje, že traktor bude i nadále hlavním zdrojem trakční síly, budoucnost je v nasazení rojů robotických platforem s nižší hmotností.
Fendt vede vývojový projekt Xaver (Obrázek 7). Systém Xaver zahrnuje 6 až 12 koordinovaných robotů a cloudovou platformu pro plánování, sledování a přesné zdokumentování jednotlivých úkonů. Vedle nižších emisí a úspor paliva vykazuje výrazně nižší zhutňování půdy. Nevýhodou je, že traktor s hmotností nižší než 40 kg bude limitován nízkou trakcí. To bude i nadále vyžadovat součinnost s traktory.

Obrázek 7: koncept platformy Fendt Xaver. (Foto Fendt)
„Roj“ robotizovaných traktorů byl rovněž vyvinut na japonské univerzitě Hokkaido v rámci projektu zaměřeného na snížení závislosti na pracovní síle (Karsten 2019).

Obrázek 8: Roj autonomních traktorů Yanmar na univerzite Hokkaido, Japonsko. (Foto Yanmar)
Komerčně dostupnými jsou dnes roboti společnosti Naio. U nasazení platforem se počítá především s kultivačními pracemi. Na obrázku 9 je představen robot Naio Dino.

Obrázek 9: Robot Naio Dino. (Foto Kroulík)
Koncepce robotické platformy Ekorobotix je určena pro cílenou aplikaci herbicidů v širokořádkových plodinách.

Obrázek 10: Robotická platforma Ecorobotix. (Foto Kroulík)
V roce 2018 byla společností Leading Farmers a.s. v České republice představena robotická platforma Agrointelli Robotti (Obrázek 11). Koncepce je založena na dvou motorových jednotkách, které jsou spojeny nosnou trubkou. Na té je umístěn standardní tříbodový závěs pro připojení běžného zemědělského nářadí. V roce 2019 byly autonomně zasety první plochy.

Obrázek 11: Předváděcí akce společnosti LeadingFarmers a.s. a představení robota Agrointelli Roboti.
Na řadě univerzit a výzkumných centrech je veden výzkum a vývoj zaměřený na uplatnění robotů v zemědělství. Mezi mediálně známé projekty patří „Hands Free Hectare” univerzity Harper Adams University. Univerzitní pozemek je zcela obhospodařován robotickými stroji.
Jedno z největších výzkumných center zaměřených na robotiku je Australian Centre for Field Robotics.
Projekt FARMS (Fields Agricultural Robotics Mobile Systems) vedený na technické fakultě ČZU v Praze
Robotický tým TF ČZU se zaměřuje na výzkum, vývoj a aplikace autonomních robotických platforem a systémů pro využití ve venkovních polních podmínkách (Obrázek 12). Vedle vývoje nových platforem se tým rovněž zabývá implementací stávajících systémů, návrhy aplikací pro tyto systémy a hledání cest pro uplatnění v zemědělství a environmentálních podmínkách.
Tým svými aktivitami navazuje na stále rostoucí požadavky na uplatňování umělé inteligence, propojení širokého okruhu vědních oborů, senzorové a výpočetní techniky nebo telekomunikačních soustav jako možnou odpověď na současné ekonomické, společenské, sociální nebo environmentální požadavky, výzvy a problémy. Podpora aplikací a technologií v podobě autonomních systémů, které vzejdou z vývojové a výzkumné činnosti, je předpokladem pro efektivní a šetrné hospodaření v krajině.
Tým je otevřen pro široký okruh vědních oborů a disciplín, které jsou na univerzitní půdě zastoupeny.
Vedle výzkumné a vývojové činnosti jsou pořádány výukové kurzy pro zájemce z řad studentů. Ti se následně mohou přímo podílet na dílčích úkolech spojených s aplikací robotických platforem v reálných podmínkách. Robotický tým se pravidelně a zároveň velmi úspěšně účastní mezinárodních soutěží.
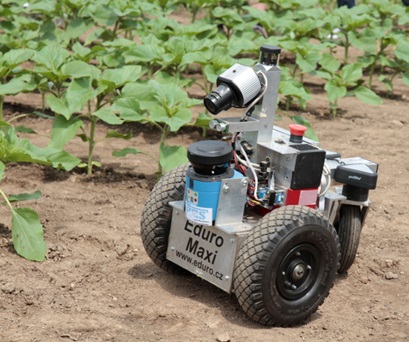
Obrázek 12: Robotická platforma pro práci a monitoring porostů v řádcích širokořádkových plodin EDURO Maxi. (Foto Kroulík)
Bezpilotní prostředky
Jedna z významných oblastí pro uplatnění robotických systému je dálkový průzkum Země s využitím bezpilotních prostředků. Bezbilotní prostředky lze klasifikovat jako poloautonomní, autonomní, případně skupinová UAV (UnmannedAerialVehicle) v závislosti na úrovni automatizace. Z hlediska konstrukce rozlišujeme především dva typy. Jeden typ je konstrukce delta křídla, druhý typ představuje multikoptéru s více motory (Vasconez a kol., 2019), (Obrázek 13). Snímky pořízené bezpilotními prostředky se používají ke sběru informací o celých pozemcích. Tato data mohou být dále propojována s údaji shromážděnými senzory zemědělských strojů za účelem vytvoření podrobných digitálních map konkrétních zón (Hoeren a Kolany-Raiser 2018).

Obrázek 13: Konstrukční řešení používaných bezpilotních prostředků, delta křídlo a multikoptéta. (foto Kroulík)
K monitoringu zájmového území se využívá kamer, multispektrálních kamer, termokamer nebo LIDARů. Pomocí snímků lze analyzovat variabilitu rostlin, půdy, detekovat výživný stav rostlin, plevele, škůdce, choroby, klasifikovat stresové faktory, případně aplikovat látky.
Schmale a kol. (2008) zaznamenali během autonomních přeletů a odběrů nad sledovanými pozemky výskyt celé řadu nebezpečných patogenů rostlin zejména u pšenice, ječmene a kukuřice. Techy a kol. (2010) použili bezpilotních prostředků ke zjištění a popisu šíření spor plísně bramborové z míst se zaznamenaným výskytem. Byly dokonce nasazeny dva stroje, které pracovaly ve vzájemné součinnosti. Podobný způsob odběru vzorků by mohl v budoucnu přispět k určení míry rizika infekce, šíření chorob a napomáhat k efektivnějšímu rozhodování o použití vhodných účinných látek.
Výzkumně se řeší rovněž využití platformy co-robot, a to nejen pro spolupracující s lidmi ale také s ostatními stroji nebo roboty (Obrázek 14). Vzájemnou spolupráci mezi pozemními stroji a bezpilotními letadly představuje ve své práci Schattenberg a kol. (2011).
Jistou alternativou nebo doplňkem pro stroje na ochranu rostlin jsou bezpilotní prostředky vybavené aplikačním zařízením (Obrázek 15). Využití naleznou především v hůře dostupném terénu, případně v ohniskovém ošetření ploch. Rovněž může ošetřit příslušné partie vzrůstnějších výsadeb, které stroje pro ochranu rostlin již nedokáží spolehlivě ošetřit. V rozvojových zemích tito roboti představují náhradu za ruční ošetření, kdy dochází k intenzivnímu kontaktu člověka s používanými chemikáliemi a výraznému navyšování aplikovaných postřiků.

Obrázek 14: Kooperace pozemní platformy a bezpilotního prostředku. (foto Kroulík)

Obrázek 15: Bezpilotní prostředek vybavený aplikačním zařízením. (foto Kroulík)
Robotika v živočišné výrobě
Velmi dobrým příkladem uplatnění robotických systémů je chov hospodářských zvířat, kde mikročipy a senzory například v obojcích nebo ušních známkách měří tělesnou teplotu, životně důležité údaje a pohybové aktivity zvířat. Analýza těchto údajů neumožňuje pouze nepřetržité sledování zdraví krav, ale také například upozorňuje na vhodný termínu pro inseminaci nebo na blížící se porod. Farmáři a veterináři jsou upozorňováni softwarově řízenou aplikací. Dojení krav je již zcela prováděno pomocí robotů, které rovněž kontrolují užitkovost jednotlivých krav. Rovněž je sledováno stájové prostředí. Veškeré tyto informace umožní včasné rozpoznání a řešení problémů, napomáhají optimalizaci chovu a přispívají k pohodě a klidu zvířat (Hoeren a Kolany-Raiser 2018, Loučka a kol., 2019). Robotických systémů se dále využívá k čištění chodeb nebo zakrmování Wolfert (2017). Obecně lze říci, že v oblasti živočišné výroby se setkáváme se systémem inženýrských budov, které poskytují nezbytné chovatelské prostředí a podpůrné infrastruktury pro chod chovatelského zařízení (Purswell a Gates 2013).
Na obrázku 16 je představena robotická platforma pro zajištění pohybové aktivity drůbeže na volné podestýlce. Uplatnění nachází v chovech nosnic, kde dochází k redukci snůšky mimo snášková hnízda, ale také u brojlerů, kde je sledován, díky pohybu zlepšený zdravotní stav drůbeže.

Obrázek 16: Platforma Tibot, určená do chovných zařízení drůbeže. (foto www.tibot.fr)
Podpora robotických systémů
Na řadě pracovišť se zkouší pátá generace mobilní komunikační sítě, zkráceně 5G. Jedno z takových pracovišť se nachází v Drážďanech. Tento bezdrátový standard není jen rychlejší než jeho předchůdci, ale je orientován na potřebu vysoké rychlosti přenosu dat (GB / s) na jedné straně a rychlou dobou odezvy na straně druhé (1 ms). Možnosti 5G sítě nabízí rychlou reakci na pokyny uživatelů, vzájemnou koordinaci strojů, M2M komunikaci, podporu IoT a celkový rozvoj autonomie (Prof. Dr.-Ing. Frank H.P.Fitzek, Leiter der Deutschen Telekom ProfessurfürKommunikationsnetze in Dresden: „Echtzeitfähige Funkvernetzung für hochautomatisierte Arbeitsmaschinenund - prozesse in der Landwirtschaft“)
Nasazení stroje vyvolává pokaždé mnoho otázek – jeho pořízení, přizpůsobení se specifickému prostředí, jeho ziskovost, dlouhodobá účinnost… a to platí o to více, když je tento stroj robot. Řádná příprava a schopnost vypořádat se změnami jsou klíčovými faktory, aby byl projekt úspěšný. Je proto nutné připravit farmu ... a sebe! Ačkoli robotika patří mezi řešení pro budoucnost zemědělství, tyto technologie se dosud v profesionální sféře často nepoužívají. Při prezentacích a výstavách tak odborníci využívají zpětnou vazbu od zemědělců. S nasazením robotů však přichází nové výzvy a omezení. V současné době se začínají řešit samotné legislativní opatření pro nasazení robotů. Rovněž otázka zabezpečení dat je aktuálním předmětem při nástupu nových technologií. Zákony a předpisy týkající se zemědělských údajů nejsou mezi zeměmi konzistentní. V dubnu 2016 vstoupilo v platnost nové evropské nařízení o ochraně a bezpečnosti údajů s cílem posílit práva občanů a poskytnout jim větší kontrolu nad jejich osobními údaji. Vztahuje se však na osobní údaje a primárně chrání spotřebitele. Údaje generované hospodářskými zvířaty nebo pozemky nespadají do oblasti působnosti nařízení. V současné době je vlastníkem údajů ve většině případů strana, která je shromažďuje (výrobci traktorů, dojících robotů atd.) (David a kol., 2016).
Použité zdroje:
Astrand B., Baerveldt A.J. (2005): A vision based row-following system for agricultural field machinery. Mechatronics, 15(2), 251-269.
Bechar, A., Vigneault, C. (2016): Agricultural robots for field operations: Concepts and components. Biosystems Engineering, 149, 94-111.
Blackmore B.S. (2009): New concepts in agricultural automation. Precision in arable farming - current practice and future potential. Stoneleigh Park, Kenilworth, Warwickshire, UK, Home Grown Cereal Authority.
Brini M (2017): https://inclusivegrowthforum.org/digital-agriculture-smart-farming-precision-agriculture-perspectives-prestigious-consulting-firms/
David P., BannierB., Croguennec E., Sedra R. (2016): Agricultural cooperatives and digital technology. What are the impacts? What are thechallenges?
Grieco L. A., Rizzo A., Colucci S., Sicari S., Piro G., Di Paola D., Boggia G. (2014): IoT-aided robotics applications: Technological implications, target domains and open issues. Computer Communications, 54, 32-47.
Grimstad L., From P. J. (2017): Thorvald II - a modular and re-configurable agricultural robot. IFAC-Papers On Line, 50(1), 4588 - 4593.
Hoeren T., Kolany-Raiser B. (2018): Big Data in Context: Legal, Social and Technological Insights. Springer.
https://www.pwc.fr/fr/assets/files/pdf/2016/10/agribusiness-and-digital-technology-2016.pdf
Karsten B. (2019): John Deere presents autonomous robot traktor. https://www.futurefarming.com/Machinery/Articles/2019/9/John-Deere-presents-autonomous-robot-tractor-477235E/
Karsten B. (2019): Tractor swarms poised to take over. https://www.futurefarming.com/Machinery/Articles/2019/7/Tractor-swarms-poised-to-take-over-440320E/
Loučka R., Homolka P., Jančík F., a kol. (2019): Precizním farmařením k lepším výsledkům ve výrobě. Sborník ze semináře pro chovatelskou veřejnost: Prvky precizního zemědělství v chovu hospodářských zvířat. Praha, Útvar dokumentace a propagace VÚŽV, v.v.i. Uhříněves.
Marinoudi V., Sørensen C. G., Pearson S., Bochtis D. (2019): Robotics and labour in agriculture. A context consideration. Biosystems Engineering, 184, 111-121.
Noguchi N. (2018): Agricultural vehicle robot. Journal of Robotics and Mechatronics, 30(2), 165-172.
Purswell J. L., Gates R. S. (2013): Automation in Animal Housing and Production. In: Zhang Q, Pierce F., J. Eds. Agricultural Automation: Fundamentals and Practices, CRC Press, 205-224 p.
Rovira-Más F., Zhang Q., Hansen A. C. (2011): Mechatronics and intelligent systems for off-road vehicles, Springer.
Ruckelshausen A., Biber P., Dorna M., Gremmes H., Klose R., Linz A., Rahe R., Resch R., Thiel M., Trautz D., Weiss U. (2009): BoniRob: an autonomous field robot platform for individual plant phenotyping. In: Precision agriculture ’09: Proceedings of the 7th European Conference on Precision Agriculture, Wageningen Academic Publishers, Wageningen, the Netherlands, 988 p.
Schattenberg J., Lang T., Becker M., Batzdorfer S., Hecker P., Andert F. (2011): Präzise Relativpositionierung in Maschinenschwärmen. Landtechnik, 66 (5), 333-336.
Schmale D.G., Dingus R., Reinholtza C. (2008): Development and Application of an Autonomous Unmanned Aerial Vehicle for Precise Aerobiological Sampling above Agricultural Fields. Journal of Field Robotics, 25(3), 133-147.
Schönfeld M., V., Heil R., Bittner, L. (2018): Big Data on a Farm—SmartFarming. In: Hoeren T., Kolany-Raiser B., Eds. Big Data in Context, pp.109-120.
Shankar S., van Raemdonck F., Maine D. (2016): Can Agribusiness Reinvent Itself to Capture the Future? Bain&Company.
Shearer S., Pitla S. (2013): Field Crop Production Automation. In: Zhang Q, Pierce F., J. Eds. Agricultural Automation: Fundamentals and Practices, CRC Press, 97-122 p.
Sheridan, T. B. (2016): Human-robot Interaction: Status and challenges. Human Factors, 58(4), 525 - 532.
Soukup J. (2000): Regulace zaplevelení v pojetí precizního zemědělství. Sborník z 6. konference: Racionální použití hnojiv, KAVR AF ČZU v Praze, 30.11.2000, 56-61.
Stentz A., Dima C., Wellington C., Herman, H., Stager, D. (2002): A system for semi-autonomous tractor operations. Autonomous Robots, 13(1), 87-104.
Tan Y., Zheng Z. Y. (2013): Research advance in swarm robotics. Defence Technology, 9(1), 18-39.
Techy L., Schmale III D. G., Woolsey C. A. (2010): Coordinated aerobiological sampling of a plant pathogen in the lower atmosphere using two autonomous unmanned aerial vehicles. Journal of Field Robotics, 27(3), 335-343.
Tervo K., Koivo, H. N. (2014): Adaptation of the human machine interface to the human skill and dynamic characteristics. IFAC ProceedingsVolumes, 47(3).
United Nations (2019): WorldPopulationProspects 2019: The 2019 Revision of World PopulationProspects,https://population.un.org/wpp/Publications/Files/WPP2019_10KeyFindings.pdf
Van Henten E.J., Van Asselt C.J., Bakker T., Blaauw S.K., Govers M.H.A.M., Hofstee J.W., Jansen R.M.C., Nieuwenhuizen A.T., Speetjens S.L., Stigter J.D., Van Straten G., Van Willigenburg, L.G. (2009): WURking: a small sized autonomous robot for the Farm of the Future. In: Precision agriculture ’09: Proceedings of the 7th European Conference on Precision Agriculture, Wageningen Academic Publishers, Wageningen, the Netherlands, 833-840.
Vasconez J. P., Kantor G., A., Cheein F., A., A. (2019): Human–robot interaction in agriculture: A survey and current challenges. Biosystems engineering, 179, 35-48.
Wolfert S., Ge L., Verdouw C., Bogaardt M. J. (2017): Big data in SmartFarming–a review. Agricultural Systems, 153, 69-80.
Zhang C., Yang L., Noguchi N. (2015): Development of a robot tractor controlled by a human-driven tractor system. Engineering in agriculture, environment and food, 8(1), 7-12.