Klíčová slova: "ochrana, rostliny, precizní, zemědělství"
Ing. Jan Lukáš, Ph.D.
Předpokládá se, v roce 2050 že světová populace dosáhne 9 mlr obyvatel, což bude znamenat naplnit potřebu růstu produkce potravin o 70% oproti současnému stavu. Zároveň se zvyšuje část rostlinné produkce, které je používána v podobě biomasy pro energetické účely. Aby bylo možné dostát požadavkům na dostatečné množství potravin, bude nezbytné maximalizovat efektivitu produkce minimalizováním ztrát způsobených škodlivými organismy - plevely, živočišnými škůdci a patogeny (viry, bakterie, houby). Management ochrany rostlin se bude muset současně vypořádat s rostoucím tlakem na omezování množství syntetických chemických přípravků spolu s klesajícím množstvím použitelných účinných látek. Nezbytně se také bude muset vyrovnat se vzrůstajícími požadavky na bezpečnost potravin i ochranou přírodních zdrojů - vody, půdy a ovzduší.
Heterogenita
Škodlivé organismy stejně jako přírodní podmínky vykazují značnou heterogenitu v prostoru a čase. S tou je se je možné pomocí současných nových technologických prostředků efektivně pracovat tak, aby zdroje využívané pří pěstování porostů (agrotechnika, osiv/sadba, hnojení/výživa, ochranné prostředky/pesticidy) dosáhly nejen potřebné účinnosti, ale zároveň byly použity v prostoru i čase v míře nezbytně nutné. Prostorovou distribuci škodlivých organismů ovlivňují topografické podmínky, heterogenita meteorologických faktorů, odrůdová rezistenci, aktuální kondice porostu s ohledem na výživových stav, dostatek vody či přítomnost jiného biotického či abiotického stresoru. Komplexnost působení všech těchto faktorů vyžaduje optimalizovat nejen metodu vzorkování, ale vyhodnocovat působení těchto vlivů v kontextu. Volba metody vzorkování je důležitá nejen z hlediska optimálního provedení (Minařík et al., 2018), ale promítá se do ní i hledisko proveditelnosti a ekonomické náročnosti. Příkladem dobré praxe jsou vinice či ovocné sady, které mají detailně pro-pracované metody integrované ochrany rostlin navázané na systém monitorování pomocí feromonových lapačů. Tyto lapače bývají v současnosti osazovány kamerou pro časosběrné snímkování lepové plochy s možností distančního vyhodnocení.

Automatizovaný feromonový lapač TrapView integrovatelný do IoT (http://trapview.blogspot.com/2016/12/modelling-of-up-to-three-different.html)
Senzorová technika
Pro monitorovování heterogenity slouží především senzorová technika, která je používaná statickým či dynamickým způsobem. Mezi tradičně používané statické senzory patří prostředky pro měření a sledování proměnlivosti abiotických faktorů v čase v podobě meteosenzorů rozmístěných jednotlivě nebo v setech meteorologických stanic. Znalost těchto veličin je pro zemědělce nepostradatelná, z hlediska dynamiky teploty, srážek, vlhkosti vzduchu a půdy, nejen pro sledování dynamiky růstu a zdraví porostu, ale i pro další aplikace. Těmi jsou předpovědní modely vývoje škodlivých organismů. Znalost kritických proměnných v těchto modelech v podobě spodních prahů vývoje a sum efektivních teplot umožňuje, při znalosti podrobné bionomie škodlivých organismů, predikovat jejich vývoj v čase a správně časovat potřebná ochranné zásahy tak, aby byly z hlediska použité účinné látky maximálně účinné.
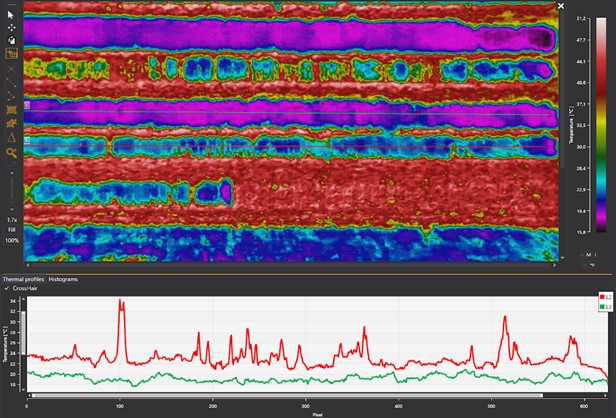
Zásadní přínos senzorové techniky pro ochranu rostlin v precizním zemědělství je v oblasti 1/ včasné detekce výskytu škodlivého organismu, 2/ operativnosti průzkumu , 3/ kontrole kvality ochranných opatření. To vše ve velkoplošném měřítku a opakovatelnosti v krátkém čase. Excelentním příkladem včasné detekce výskytu škodlivých organismů je využití termokamerové techniky, která identifikuje teplotní změny rostlin s ohledem na přítomnost abiotického nebo biotického stresoru (Lukáš et al, 2019). Primární reakcí rostlin na stresové faktory je změna fyziologicko-chemických reakcí, které následně vedou i k vizuálně dobře pozorovatelným anatomicko-morfologických změnám (např. vadnutí, nekrózy, zpomalení růstu apod.). Brant a kol. (2014) prokázali pomocí měření toku vody v rostlinách velmi rychlý vliv přípravků ze skupiny inhibitorů fotosystému II na omezení transpirace ve srovnání s inhibitory auxinů. Z hlediska účinku chemických látek na rostliny se jedná o samotný proces vlivu aplikace na fyziologické projevy rostliny, zejména v souvislosti s chemickými procesy v rostlině. Tyto procesy mohou být spojeny s omezenou funkcí autoregulačních procesů spojených např. s porušením systémů ovlivňujících otevírání a uzavírání průduchů. Efekt zavírání/otevírání průduchu provázený změnou povrchové teploty lez vhodně kvantifikovat pomocí teplotních indexů. Nejjednodduší index počítá s rozdílem povrchové teploty porostu (Tc) – aktuální teploty vzduchu (Ta) , další rozšířený index CWSI (Idso et al, 1977, 1981, Jackson et al., 1981) se vypočte podle rovnice: CWSI = (((Tc – Ta)- b)/ (a – b)), kde a je rozdíl mezi hodnotou aktuálního rozdílu teplot porostu a vzduchu (Tc-Ta) a spodní hraniční přímky pro plně transpirující porost při dané úrovni sytostního doplňku, b je rozdíl mezi Tc-Ta a hodnotou maximálního rozdílu mezi teplotou vzduchu a nejvyšší teplotou netranspirujícího porostu a vzduchu. Příklad v grafu 1 ukazuje teplotní reakci různých odrůd pšenice ozimé na přítomnost viru BYDV. V kontrolní neinfikované řadě odrůd je teplota (zelená křivka) nižší než u infikovaných rostlin (červená křivka).
Graf 1: Termogram zobrazující rozdílnou teplotní odezvu u zdravých (zelená barva) a BYDV napadených odrůd (červená barva) pšenice ozimé
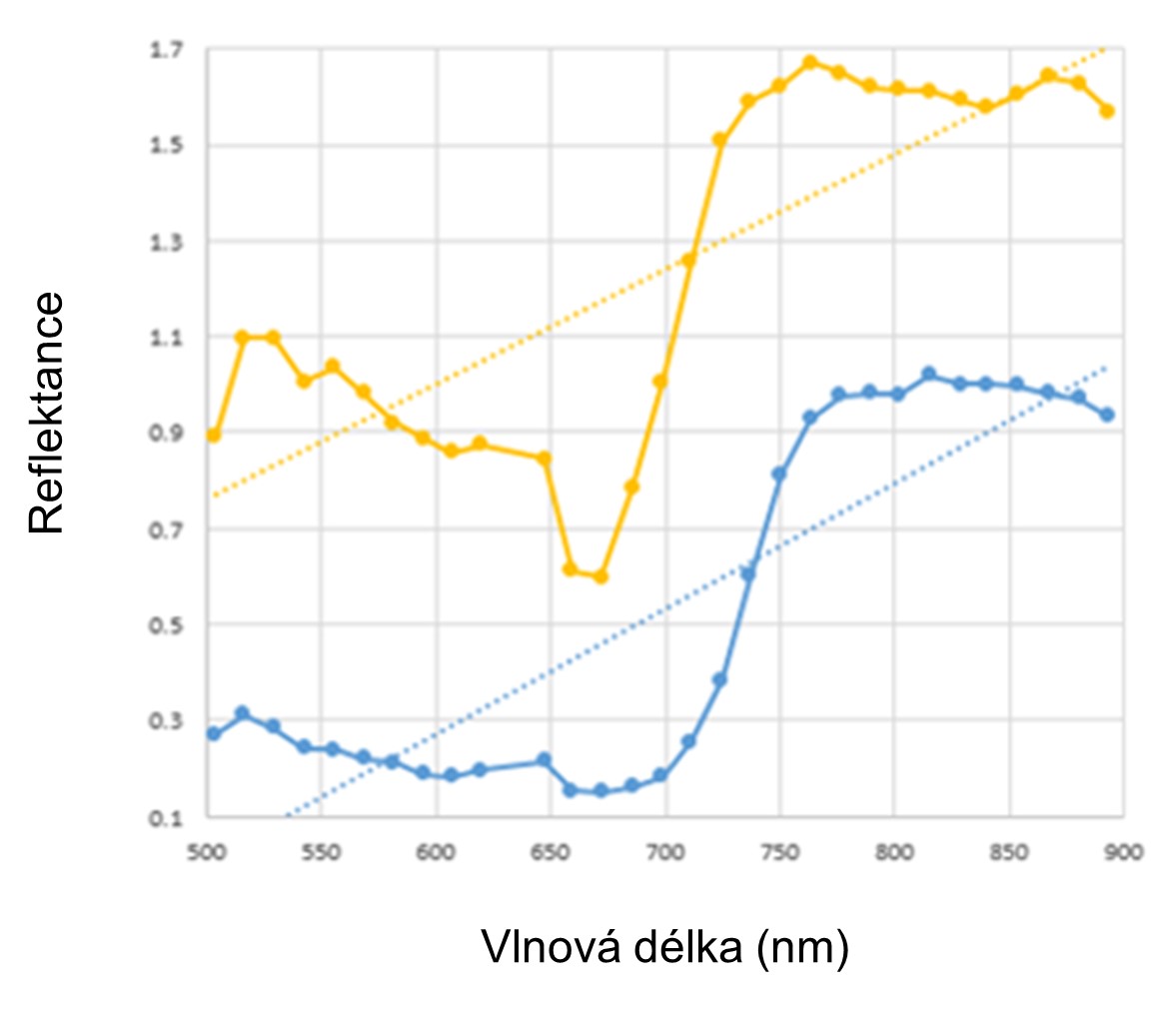
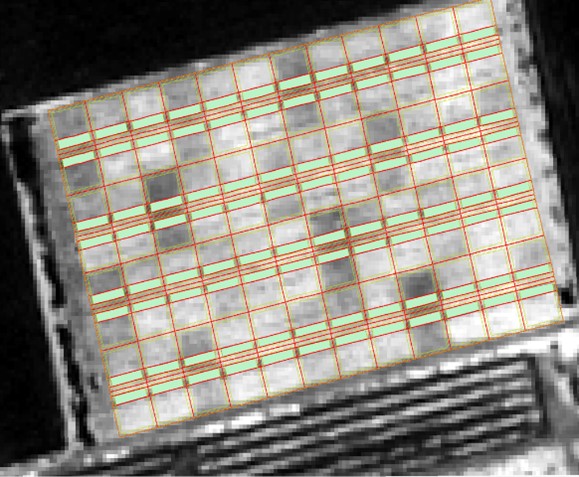
V neposlední řadě lze využít změnu odrazivost vegetačního krytu pro podrobnější identifikaci biotických a abiotických stresorů, které vyvolávají snížení odrazivosti v oblasti NIR a nárůst v červené části spektra. Tyto změny jsou spojeny s posuny zastoupení jednotlivých rostlinných pigmentů. Jelikož ke změně dochází nejdříve v infračervené části spektra, je možné a vhodné navázat touto analýzou na termografickou detekci. Informace z multispektrálních nebo hyperspektrálních senzorů se informačně zjednodušují do podoby vegetačních indexů při využití jednoduchých aritmetických operací se spektrálními pásmy pro zvýraznění fyziologických/biochemických aspektů rostlin v porostu (např. množství chlorofylu, dusíku atd.). Přehled nejpoužívanějších vegetačních indexů uvádí tabulka 1. Na obrázku hlávek zelí stresovaných nedostatkem vody (Graf 2) je patrna změna reflektance v podobě jejího zvýšení (posun žluté křivky, bez zálivky, vzhůru oproti modré křivce se zálivkou). Pro detekci projevů přítomnosti patogenů či škodlivého hmyzu hraje významnou roli prostorové rozlišení, které je definováno velikostí pixelu, tedy základní jednotky digitálních obrazových dat. Obecně platí, že družicové snímky mají nižší prostorové rozlišení než snímky pořizované pomoc senzorů nesených bezpilotními prostředky v oblasti ochrany rostlin jsou omezeně použitelné nebo zcela nepoužitelné pro včasnou detekci iniciálních fázích napadení porostu. Nabývají však na význam při kalamitních stavech a nebo vyčíslování velkoplošných škod (Obr 1).
Graf 2: Změna reflektance zelí na časové ploše 4 dnů se zálivkou (modře) a bez zálivky (žlutě) (Brant, Kroulík, Lukáš, 2019, ČZU)
Obr 1. Rozdíly v prosotorovém rozlišní. Vlevo snímek z družicové multispektrální platformy, vpravo snímek z bezpilotní platformy osazené multispektrálním senzorem

Tab 1 Vztahy pro výpočet vybraných vegetačních indexů používaných při detekci vodního stavu rostlin

Předpovědní modely
Časová komponenta je v ochraně rostlin nahlížena nejčastěji ze dvou úhlů. Prvním je dynamika faktoru v čase ve smyslu změny intenzity výskytu, druhým pak časování (timing) ochranného zásahu. V případě škodlivého hmyzu je dominantním faktorem určujícím rychlost jejich vývoje teplota (Graf 1). Ta je využívána v tzv. teplotních modelech, které jsou schopné na základě znalosti spodních prahů vývoje (SPV) a sumy efektivních teplot (SET) u konkrétních druhů, resp. jejich vývojových stádii determinovat klíčové události (např. kladení vajíček, dobu vývoje larev, letovou aktivitu) zásadní jak pro popis časové dynamiky, tak časování ochranných zásahů. Například i mšice kyjatky travní Metopolophium dirhodum (Walker, 1849) je SPV = 2.9°C a SET = 159ds (denní stupně (ds) jsou hodnoty nad SPV). SET je kumulativní součet hodnot denních stupňů nad SPV, který se vypočítá SETds = ∑ ((Tmax+Tmin)/2 – SPV), kde výpočet denní teploty T=(Tmax+Tmin)/2 se nejvíce blíží hodnotě 24 hodinového průměru ∑Th/24 za předpokladu, že Tmin > SPV. Je-li Tmin < SPV počítá se efektivní teplota ET jako integrál plochy pod křivkou sinu nad SPV: ET= [(c/2)-SPV*(π /2-ϴ)+((Tmax-Tmin)/2)*cos(ϴ)]/π. Po dosažení SET = 159ds je vývoj mšic (narození-dospělost, resp. indikuje začátek kladení nové generace mšic) a tedy i model, ukončen. Problematika teplotních modelů škodlivého hmyzu je detailně zpracována (např. Dixon et al., 2009) a jednotlivé modely i se svými parametry pro tyto účely publikovány (např. Honěk 1996). Přehled SPV a SET pro hlavní druhy obilních mšic je uveden v tabulce 1.
Mapování prostorové heterogenity
Tímto způsobem je precizně podchycena časová stránka heterogenity škodlivých organismů. Sledování prostorové komponenty je doménou přístupu vycházejícího z principů precizního zemědělství, které dlouhodobě pracuje s geopozičními systémy pro přesnou alokaci dynamiky sledovaných abiotických a biotických faktorů. Vzhledem k provázanosti a komplexnosti pěstovaní zemědělských plodin se první prostorová komponenta odvíjí od heterogenity půdy a možnostech sledování proměnlivosti jejích kritických komponent (struktura, textura, zastoupení minerálních živin, obsah uhlíku, dostupnost vody). V tomto směru se mimořádně dobře osvědčují senzorové techniky vycházející z dálkového průzkumu země ať už pomocí senzorů nesených družicemi, letadly či bezpilotními prostředky. Možnost rychlosti popisu velkých ploch v krátkém čase s možností zpřesnění na základě pozemní kalibrace v cíleně vybraných zónách přináší fundamentální základ pro následné sledování vegatace polních plodin, které půdní stav reflektují. Prostorová kondice porostu ho pak predisponuje k náchylnosti/odolnosti vůči škodlivým organismům. Znalost heterogenity, půdy, porostu a abiotických faktorů následně umožňuje v řízení ochrany způsobem, který aktivně pracuje s časovou a prostorovou složkou heterogenity přítomnosti škodlivých organismů. Na základě předpovědních modelů je pak možné přesně prostorově cílit ochranné zásahy aplikační technikou, resp. rozhodovat, zda jsou tyto zásahy nezbytné z hlediska jejich ekonomiky, v kontextu dopadu na životní prostřední i bezpečnost potravin. Tato rozhodovací matice je součástí expertních rozhodovacích systému, které všechny tyto váhy vyhodnocují pro s ohledem na pěstitelský cíl. S tím je spojena i potřeba rychlého zpracování velkého množství dat z monitoringu senzorovou technikou na cloudových úložištích, přenos dat telekomunikačními kanály, ochrana dat a jejich zpracování analytickými algoritmy a modely a syntetický výstup pro potřeby koncového uživatele. Nejmodernější aplikační technika umožňuje precizní aplikaci pesticidů do potřebných míst s přesností sekcí trysek nebo jednotlivých trysek tak, aby byly ošetřeny toliko plochy postižené škodlivými organismy v nadprahové míře. Cílenost zásahů je dále zvyšována i možností vytáčení aplikačních trysek z kolejových meziřádků. Tato drobné změna je schopná přímo ušetřit až 10% pesticidů, které by jinak zbytečně dopadly bez zamýšleného užitku do prostoru kolejových meziřádků.
Základním komponentů precizní ochrany rostlin je integrovaná ochrana (dále jen IO), která je založena na 8 principech: 1/ prevence výskytu škodlivých organismů a potlačování jejich populací, 2/ monitoring škodlivých organismů, 3/ rozhodování na základě dat, 4/ přednostní používání nechemických metod, 5/ multikriteriální výběr pesticidů, 6/ redukce používání pesticidů, 7/ předcházení rezistenci škodlivých organismů k pesticidům, 8/ vyhodnocování účinnosti zásahů (Barzman et al., 2015). Navzdory prokázaným ekonomickým benefitům IO v praxi (Angioni & Dedola, 2013; Lechenet et al., 2014) a pozitivním externalitám vhledem k životnímu prostředí v podobě podpory ekosystémových služeb (Bomarco et al., 2014) naráží samotná plošná implementace do praxe na nechuť samotných zemědělců z hlediska složitosti, časové náročnosti a menšímu či hůře předvídatelnému ekonomickému profitu ve srovnání s ekologickým či konvenčním zemědělstvím (Parsa et al, 2014; Pardo et al, 2010). Složitost je často spojována s vysokými nároky na vzdělání a potřebu kontextuální práce s informacemi, které bývá členěna do 3 úrovní (Goble, 2009; Rossi et al, 2012): 1/ strategické, které představuje dlouhodobé rozhodnutí o osevním postupu či použité odrůdě, 2/ taktické, zahrnující různé metody a přístupy v expertních systémech zaměřených na podporu kvality pěstované plodiny včetně rozhodnutí o způsobu ochrany před škodlivými organismy a 3/operační, jež řeší aktuální situace a reakce zohledňující např. aktuální stav růstu fázi rostlin či srážky, které znemožní pesticidní zásah.
Monitoring časoprostoru
Stanovení časoprostorového distribučního vzorce organismů je jedním z nejzásadnějších opatření nezbytná k poskytnutí důležitých informací o jejich populační dynamice a šíření. V mnoha studiích byly zkoumány modely prostorového rozložení hmyzu různými metodami včetně geostatických nástrojů a prostorové analýzy vzdálenostních indexů (SADIE). Geostatistický přístup vychází ze statistických metod analyzujících prostorové závislosti mezi odebranými vzorky (autokorelace) s cílem získat odhady proměnných pro místa, kde nebylo vzorkování prováděno (Hasani,2007). Jednou z těchto technika je SADIE, která byla aplikována v mnoha studiích zaměřených na škodlivý hmyz (De Luigi et al., Karimzadeh et al. 2011, 2015, Reay-Jones 2014,2017 a Martins et al. 2018) v porostech kukuřice, pšenice, vojtěšky a polních rajčatech.
Technologie dálkového průzkumu země (DPZ) hraje v zemědělství důležitou roli z hlediska makromanagementu, jako efektivní nástroj pro monitoring heterogenity faktorů na polích v krajinném i lokálním měřítku (Campos et al., 2016), růstu plodin (Du & Noguchi, 2017) a pro odhad výnosů plodin (Jin et al., 2016). Dálkový průzkum s pomocí hyperspektrálních senzorů může získat podrobné spektrální informace o rostlinách pro zjištění jejich fyziologického, biochemického stavu či zdravotního stavu Schmale et al (2008), Techy a kol. (2010), když v porovnání s technologií multispektrálního dálkového snímání poskytuje hyperspektrální technika detailnější informace (Pu, 2017; Adão et al., 2017)
Bezpilotní prostředky
Bezpilotní platformy jsou z hlediska precizní ochrany platformy pro nesení senzorové a/nebo postřikovací techniky. Technicky se jedná multikoptéry osazené vrtulemi, křídla - bezpilotní letadla “klasické konstrukce” s dvěma křídly, případně kombinaci obou typů zvanouVTOL (Vertical Take-Off and Landing), tedy křídla, schopného kolmého letu i přistání. Snímky pořízené bezpilotními prostředky se používají ke sběru informací pro včasnou detekci přítomnosti chorob a škůdců, resp. monitorování účinnosti agrotechnických zásahů. V zemědělství byl však první UAV bezpilotní vrtulník RMAX společnosti Yamaha (Giles & Billing, 2015), který byl představen pro aplikace v oblasti kontroly škůdců v zemědělství a monitorování plodin. V precizním zemědělství nachází UAV uplatnění při zemědělských operacích, jako je monitorování fenologie plodin včetně jejich výživového a zdravotního stavu (Bendig et al., 2012), odhad výšky plodin a výnosu (Anthony et al, 2014), postřik pesticidy (Huang et al., 2009 a 2014) analýza půdy (Primicerio. 2012). Hardwarová požadavky na nesené senzory čí postřikovací techniku jsou limitovány nejen komunikačními rozhraními, ale především nosností, dosahem letu, užitečným zatížením, konfigurací, baterií a finančními náklady. Pokud nejsou finance limitem, tak například bezpilotní letoun Pathfinder Plus,

provozovaný NASA, používal k pohonu solární články, které mu umožnili setrvat nepřetržité činnosti při snímání kávových plantáží o rozloze 3500ha na Havaji potřebnou dobu při využití špičkové snímací techniky. Díky velké nosnosti byl schopen nést RGB a multispektrální kamery s vysokým prostorovým rozlišením pro detekci zaplevelení. (Herwitz, 2004) Bezpilotnímu dálkovému průzkumu jsou používány kromě pasivní senzorů RGB kamer, multispektrálních/hyperspektrálních kamer, termokamer rovněž senzory aktivní typu LIDAR, který vysílá laserové paprsky a zpět přijímá jejich odraz. Pomocí aktivně vyslaného a zpětně přijatého odrazu laserového paprsku lze provést přesnou prostorovou rekonstrukci, pro účely sledování růstu porostu. Vysoké rozlišení RGB kamer nesených UAV lze využit i pro přesnou detekci a identifikace plevelů pro jejich cílenou likvidaci.
Aplikační technika
Posledním článkem precizní ochrany rostlin je aplikační zásah a aplikační technika, která využívá geopoziční poloautomatická navigace nad aplikační mapou. Nejmodernější technika je pak vybavena tryskami či tryskové sekcemi, které lze cíleně zapínat/vypínat v místech potřebného zásahu. Postřikovací ramena bývají vybavována i výklopnými tryskami, které lze vytočit tak, aby postřik nesměřoval do kolejového meziřádku a došlo k dalšímu omezení necílené aplikace.

Existují však i příklady automatizovaných zařízení pro vinice a sady, které využívají ultrazvuk pro k určení tvaru, senzorů pro optimalizaci kvality postřiku i vyhodnocování pokryvnosti zásahu Giles (2003), Molto (2001), Balsari (2005, 2009), Stover (2007), GilPinto (2007).
Systémy pro podporu rozhodování
Expertní systémy pro podrporu rozhodování lze definovat jako komplex nástrojů zahrnující například počítačové programy, modely a heuristické informace (tj. zkušenosti a znalosti zemědělců, inspektorů, a manažeři), které v komplexu pomáhají při rozhodování (Cohen et al. 2008). Pro ochranu před škodlivým hmyzem byly takovéto systémy vyvinuty nejprve ve vytrvalých kulturách (ovocné sady, vinice) a později i pro polní plodiny (Bange et al. 2004, Cohen et al., 2008, Pontikakos, 2012). Například systém MedCila (Cohen et al. 2008) pro řízení ochrany před vrtulí velkohlavou Ceratitis capitata (Diptera: Tephritidae), v citrusových ovocných sadech v Izraeli byl jedním z prvních pokusů o integraci těchto systémů do ochrany proti škůdcům hmyzu a jeden z prvních, který přidal prostorovou komponentu do systémů pro podporu rozhodování. MedCila pomohla snížit využití pesticidů proti vrtuli velkohlavé nejméně o 8%. V jiném případě vedlo nasazení expertního sytému proti vrtuli Dacus ciliatus (Diptera: Tephritidae) ve sklenících s pěstovanými melouny v Izraeli k až k 67% snížení používání pesticidů (Nestel at al. 2019). Podobné systémy jsou samozřejmě používány i proti hlavním původcům chorob, například plísni bramborové (Escuredo et al, 2019).
Závěr
Z uvedeného přehledu je zřejmé, že metody precizní ochrany rostlin jsou v dnešní době dostupné, účinné, nicméně omezeně používané. Jejich dalšímu rozšíření mohou napomoci dobré příklady jejich dlouhodobého praktického uplatnění v integrovaných systémech sadů, vinic či skleníkového hospodářství. Jejich implementace však předpokládá hluboké technické, biologická a agronomické znalosti, které je nutné propojit s tržním prostředím tak, aby výsledná produkce byla rentabilní.
Seznam použité literatury
Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110.
Anthony, D., Elbaum, S., Lorenz, A., & Detweiler, C. (2014) “On crop height estimation with UAVs.” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), pp. 4805-4812.
Balsari, P., P. Marucco, et al. (2005). Adjustment of an air assisted sprayer in a peach orchard to optimise applications against oriental fruit moth (Cydia molesta). Sprayfruit Cuneo Proceedings, pp.187-193.
Balsari, P., P. Marucco, et al. (2009). A crop identification system (CIS) to optimise pesticide applications in orchards. Journal of Horticultural Science & Biotechnology ISAFRUIT Special Issue, pp. 113–116.
Bange, M.P.; Deutscher, S.A.; Larsen, D.; Linsley, D.; Whiteside, S. A handheld decision support system tofacilitate improved insect pest management in Australian cotton systems. Comput. Electron. Agric. 2004, 43, 131–147
Bendig, J., Bolten, A., & Bareth, G. (2012) “Introducing a low-cost mini-UAV for thermal-and multispectral-imaging.” Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci, 39, pp.345-349.
Brant, V., Pivec, J., Hamouzová, K., Zábranský, P., Satrapová, J., Škeříková, M. 2014c: Determination of the infl uence of herbicides on dicotyledons plant transpiration using the sap fl ow method. Plant Soil Environment. 60: 562–568.
Campos-Taberner, M.; García-Haro, F.J.; Confalonieri, R.; Martínez, B.; Busetto, L. Multitemporal Monitoring of Plant Area Index in the Valencia Rice District with PocketLAI. Remote Sens. Env. 2016, 8, 202.
Cohen, Y.; Cohen, A.; Hetzroni, A.; Alchanatis, V.; Broday, D.; Gazit, Y.; Timar, D. Spatial decision supportsystem for Medfly control in citrus. Comput. Electron. Agric. 2008, 62, 107– 117.
Cohen, A.; Cohen, Y.; Broday, D.; Timar, D. Performance and acceptance of a knowledge-SDSS for medfly area-wide control. J. Appl. Entomol. 2008, 132, 734–745.
De Luigi, V.; Furlan, L.; Palmieri, S.; Vettorazzo, M.; Zanini, G.; Edwards, C.R.; Burgio, G. Results of WCR monitoring plans and evaluation of an eradication programme using GIS and Indicator Kriging. J. Appl. Entomol. 2011, 135, 38–46.
Dixon A. F. G., Honěk A., Keil P., Kotela M. A. A., Sizling A. L., Jarošík V. (2009): Relationship between the minimum and maximum temperature thresholds for development in insects. Functional Ecology, 23, 257-264.
Du, M.; Noguchi, N. Monitoring of Wheat Growth Status and Mapping of Wheat Yield's Within-Field Spatial Variations Using Color Images Acquired from UAV-camera System. Remote Sens. Env. 2017, 9, 289.
Escuredo, O.; Seijo-Rodríguez, A.; Rodríguez-Flores, M.S.; Seijo, M.C. Decision support systems for detecting aerial potato Phytophthora infestans sporangia in North-West Spain. Agron. J. 2019, 111, 354–361.
Giles, D. K., & Billing, R. C. (2015) “Deployment and Performance of a UAV for Crop Spraying.” Chemical Engineering Transactions, 44, pp.307-322.
Giles, D. K., Downey D. (2003). Quality control verification and mapping for chemical application. Precision Agriculture Volume 4 , Number 1, pp.103-124.
Hasani Pak, M. Geostatistics; Tehran University Press: Tehran, Iran, 2007; 328p.
Herwitz, S. R., Johnson, L. F., Dunagan, S. E., Higgins, R. G., Sullivan, D. V., Zheng, J., Slye, R. E. (2004) “Imaging from an unmanned aerial vehicle: agricultural surveillance and decision support.” Computers and electronics in agriculture, 44(1), PP.49-61. Huang, Y.,
Hoffmann, W. C., Lan, Y., Wu, W., & Fritz, B. K. (2009) “Development of a spray system for an unmanned aerial vehicle platform.” Applied Engineering in Agriculture, 25(6), 803-809.
Honěk A. (1996): Geographical variation in thermal requirements for insect development. European Journal of Entomology, 93, 303-312.
Honěk A., Martínková Z., Lukáš J., Řezáč M., Saska P., Skuhrovec J. (2017): Mšice na obilninách: biologie, prognóza a regulace. Certifikovaná metodika, VÚRV. 54 s.
Huang, Y., Hoffman, W. C., Lan, Y., Fritz, B. K., & Thomson, S. J. (2014) “Development of a low-volume sprayer for an unmanned helicopter.” Journal of Agricultural Science, 7(1), 148.
Jin, X.; Kumar, L.; Li, Z.; Xu, X.; Yang, G.; Wang, J. Estimation of Winter Wheat Biomass and Yield by Combining the AquaCrop Model and Field Hyperspectral Data. Remote Sens. Env. 2016, 8, 972.
Karimzadeh, R.; Hejazi, M.J.; Helali, H.; Iranipour, S.; Mohammadi, S.A. Analysis of the spatio-temporal distribution of Eurygaster integriceps (Hemiptera: Scutelleridae) by using spatial analysis by distance indices and geostatistics. Environ. Entomol. 2011, 40, 1253–1265.
Karimzadeh, R.; Zakeri Ilkhchi, M.; Iranipour, S. Determining spatial distribution of alfalfa leaf weevil Hypera postica and root weevils Sitona spp. (Coleoptera: Curculionidae) using geostatistics. Appl. Entomol. Phytopathol. 2015, 83, 1–13.
Lukáš J., Haberle J., Chrpová J., Kroulík M., Brant V., Sova J., Kovář J., Švestka A. (2019): Metodika detekce vodního stresu polních plodin termokamerovým systémem. Certifikovaná metodika, VÚRV. 42 s.
Martins, J.C.; Picanço, M.C.; Silva, R.S.; Gonring, A.H.; Galdino, T.V.; Guedes, R.N. Assessing the spatial distribution of Tuta absoluta (Lepidoptera: Gelechiidae) eggs in open-field tomato cultivation through geostatistical analysis. Pest Manag. Sci. 2018, 74, 30–36.
Minařík, R., Žížala, D., Lukas, V., Kraus, M. 2018: Optimalizace vzorkování půd s využitím spektrálních dat pro účely lokálně cílené agrotechniky. Certifi kovaná metodika, VÚZT. 82s.
Nestel, D.; Cohen, Y.; Shaked, B.; Alchanatis, V.; Nemny-Lavy, E.; Miranda, M.A.; Sciarretta, A.; Papadopoulos, N.T. An Integrated Decision Support System for Environmentally-Friendly Management of the Ethiopian Fruit Fly in Greenhouse Crops. Agronomy 2019, 9, 459.
Perry, J.N. Spatial aspects of animal and plant distribution in patchy farmland habitats. In Ecology and Integrated Farming Systems; Glen, D.M., Greaves, M.A., Anderson, H.M., Eds.; John Wiley & Sons: New York, NY, USA, 1995; pp. 221–242.
Pontikakos, C.M.; Tsiligiridis, T.A.; Yalouris, C.P.; Kontodimas, D.C. Pest management control of olive fruit fly (Bactrocera oleae) based on a location-aware agro-environmental system. Comput. Electron. Agric. 2012, 87, 39–50.
Reay-Jones, F.P. Spatial distribution of stink bugs (Hemiptera: Pentatomidae) in wheat. J. Insect Sci. 2014, 14.
Reay-Jones, F.P. Geostatistical characterization of cereal leaf beetle (Coleoptera: Chrysomelidae) distributions in wheat. Environ. Entomol. 2017, 46, 931–938.
Park, Y.L.; Obrycki, J.J. Spatio-temporal distribution of corn leaf aphids (Homoptera: Aphididae) and lady beetles (Coleoptera: Coccinellidae) in Iowa cornfields. Biol. Control 2004, 31, 210–217.
Primicerio, J., Di Gennaro, S. F., Fiorillo, E., Genesio, L., Lugato, E., Matese, A., & Vaccari, F. P. (2012) “A flexible unmanned aerial vehicle for precision agriculture.” Precision Agriculture, 13(4), 517-523.
Pu, R. Hyperspectral remote sensing: Fundamentals and practices; CRC Press: Boca Raton, USA, 2017.
Schmale D.G., Dingus R., Reinholtza C. (2008): Development and Application of an Autonomous Unmanned Aerial Vehicle for Precise Aerobiological Sampling above Agricultural Fields. Journal of Field Robotics, 25(3), 133-147.
Stover, E. (2007). Sensor-Controlled Spray Systems for Florida Citrus. University of Florida extension service, 8 p.
Techy L., Schmale III D. G., Woolsey C. A. (2010): Coordinated aerobiological sampling of a plant pathogen in the lower atmosphere using two autonomous unmanned aerial vehicles. Journal of Field Robotics, 27(3), 335-343.
Yellareddygari, S.K.R.; Taylor, R.J.; Pasche, J.S.; Zhang, A.; Gudmestad, N.C. Predicting potato tuber yield loss due to early blight severity in the Midwestern United States. Eur. J. Plant Pathol. 2018, 152, 71–79.